Before examining the process of the model’s development, it is relevant to provide insights into the reasoning behind the adoption of numerical models in MARLESS. Numerical models are indeed mathematic representations of complex physical processes and, within MARLESS, they attempt to depict the dispersion of marine litter and their sources in the Adriatic area. Furthermore, the combination of a numerical model with marine litter identification through satellite images and in situ analysis gathers innovative results, as it can generate maps of the probability of accumulation valuable to improve future pilot action for marine litter tracking and removal in the Adriatic Sea.
After accomplishing an accurate process of evaluation of the advantages and disadvantages of 16 different existing numerical models, the experts of ARPA FVG selected the General NOAA Operational Modelling Environment (GNOME) as the most suitable model to pursue the objectives of the action. GNOME is a two-dimensional in-space Eulerian/Lagrangian simulation model designed for modelling pollutant trajectories in the marine environment. In its functioning, it uses as inputs maps, bathymetry, numerical circulation models, location and type of the spilled substance, oceanographic and meteorological observations, and other environmental data and produces outputs as point masses, or particles, whose trajectories depend on “movers” (winds, currents, and horizontal diffusion).
Long-term simulations which considered seasonal changes to understand how currents, winds and diffusions impact the simulations’ results have been accurately performed.' In the same fashion, the results of re-floating, which take into account the feature of beaches, have also been tested according to established parameters. Once the tests have been rigorously ultimate, ARPA FVG engaged with an optimisation of the data post-processing by summarising the results.
At this point, marine litter sources were therefore identified and the accumulations point were computed showcasing rivers, lagoons, harbours, or industrial facilities close to the seacoast representing the main sources from which marine litter is dispersed in the sea and accumulated in confined areas.
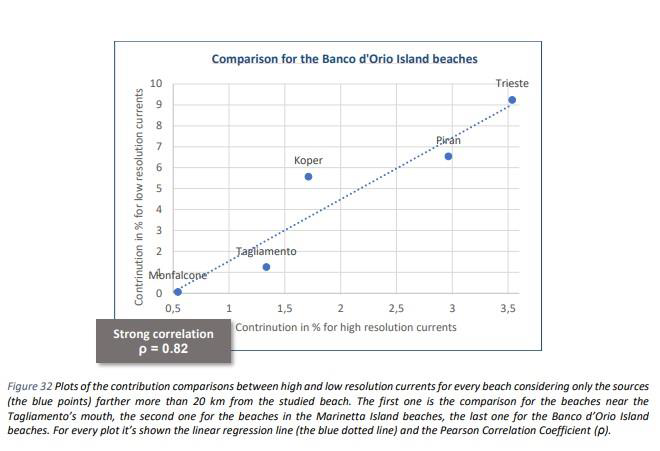
During the simulation process, considerations on the limits of reliability of low-resolution current employed have been made leading ARPA FVG to conclude that for the sources of marine litter far more than 20 km from the beaches, the accumulation results are comparable using high or low-resolution currents but for the sources close to the beaches high resolutions is preferable. However, the action brought reliable results that can be relevant for the development of future monitoring action in the Adriatic Sea.
Click here for more information about the results:
1) Model of dispersion of floating waste: Model identification PART 1
2) Model of dispersion of floating waste: Model features and implementation PART 2-3